스마트폰 모바일 신분증
모바일 운전면허증이 시행되면서 지갑에 신분증을 넣고 다니지 않아도, 스마트폰으로 간편하게 신분확인을 할 수 있게 되었습니다.
전에는 편의점에서 술을 사거나 주점, 공항 등을 이용하기 위해서 주민등록증이나 운전면허증을 제시해 본인임을 확인시켜줘야 했는데, 이제 그러지 않아도 됩니다.
사용하고 있는 스마트폰에 모바일 운전면허증을 발급받아서 이용가능하며, 이는 실물 운전면허증과 동일한 효력을 가지기 때문에 유용합니다.
Table of Contents
모바일 운전면허증 발급
모바일 운전면허증 서비스는 일부 지역에서 시범발급되다가, 22년 7월 28일부터 전국으로 확대되어 이용이 가능해졌으며 준비물로는 IC운전면허증과 모바일 신분증 앱, 발급수수료(국문-13,000원)가 필요합니다.
참고로 IC카드가 아닌 기존 사용하던 운전면허증으로도 가능한데, 나중에 스마트폰을 바꾸게 되면 재발급받아야 하는 번거로움이 있기 때문에 IC운전면허증으로 교체하는 걸 추천합니다.
IC카드는 안전운전통합민원 홈페이지나 경찰서·운전면허시험장 방문을 통해 신청 및 발급가능하고, 이후 앱으로 모바일 운전면허증 발급을 받으면 됩니다.
- 모바일 신분증>발급안내
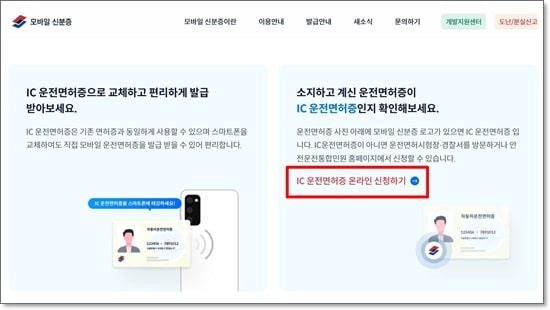
모바일 신분증 홈페이지에 접속한 다음, 상단 메뉴 중 발급안내를 클릭합니다.
- IC운전면허증 온라인 신청
화면을 내리면 중간에 ‘IC운전면허증 온라인 신청하기’가 있는데, 이를 클릭합니다.
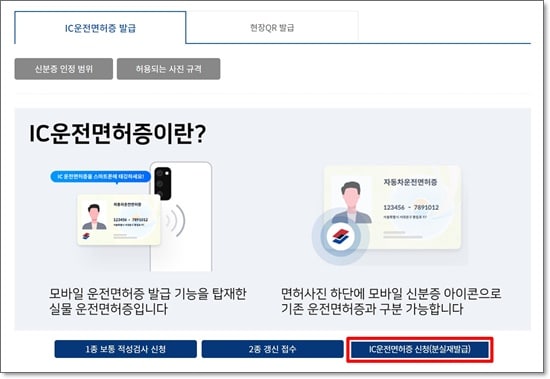
- 신청하기
IC운전면허증 신청(분실재발급)을 클릭, 실명인증한 후 진행합니다. 완료되면 면허시험장이나 경찰서에 방문해서 수령합니다.
- 모바일 신분증 앱 실행 및 발급
사용하고 있는 스마트폰에 맞는 스토어에서 모바일 신분증(운전면허증) 앱을 다운받은 후 실행합니다. 본인인증과 비밀번호 설정을 한 다음, 안내에 따라 IC카드를 인식하면 발급이 완료됩니다.


참고로 모바일 운전면허증은 1개의 스마트폰에만 등록가능하고, 국내에 거주하는 외국인 중 외국인등록증이 있는 경우에 한해서 발급받을 수 있습니다.
편의점이나 마트에서 술·담배 등을 구입할 때, 술집을 이용할 때, 은행이나 관공서 업무를 볼 때 등 다양하게 활용할 수 있어서 지갑없는 생활에 좀 더 가까워진 듯 합니다.